1. Загальний вигляд та інтерфейс μVision4
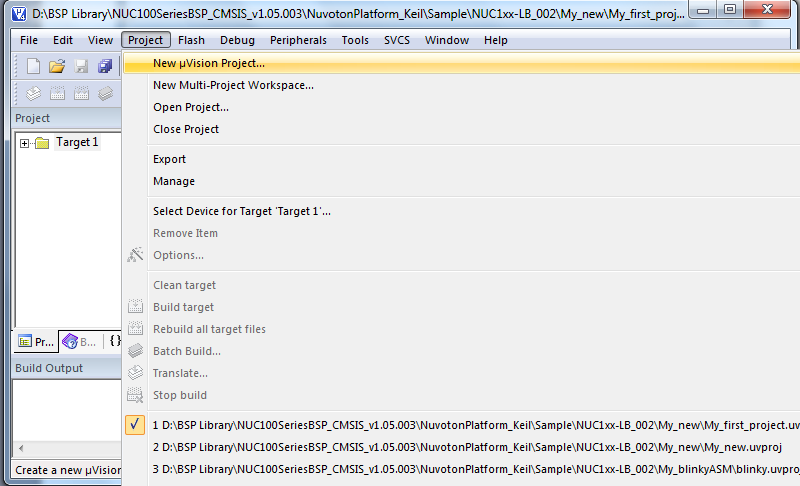
2. Створення нового проекту.
У меню Projectслід натиснути “New μVision Project”
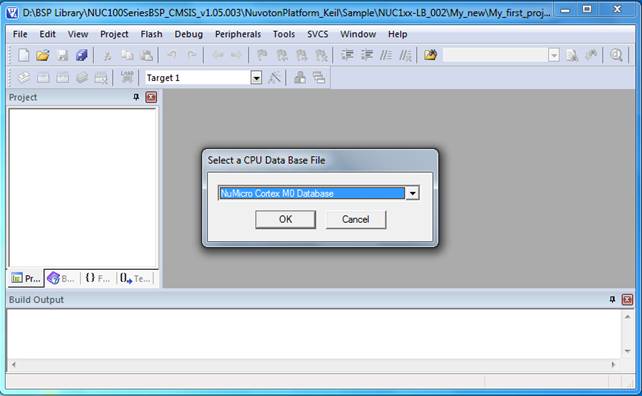
3. У вікні списку процесорів слід обрати фільтр NuMicro Cortex M0 Database.
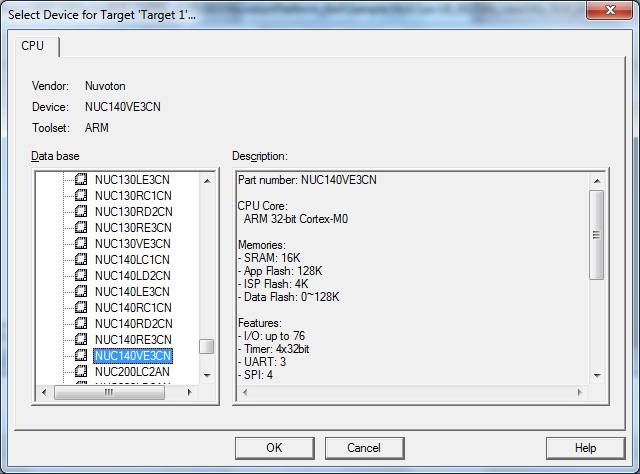
4. Обираємо назву мікроконтролера NUC140VE4CN, що використовується на навчальній платі NU LB NUC140.
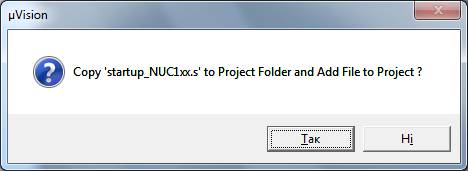
5. Далі, майстер створення проекту запропонує скопіювати файл шаблону startup_NUC1xx.s програми. На пропозицію слід погодитися.
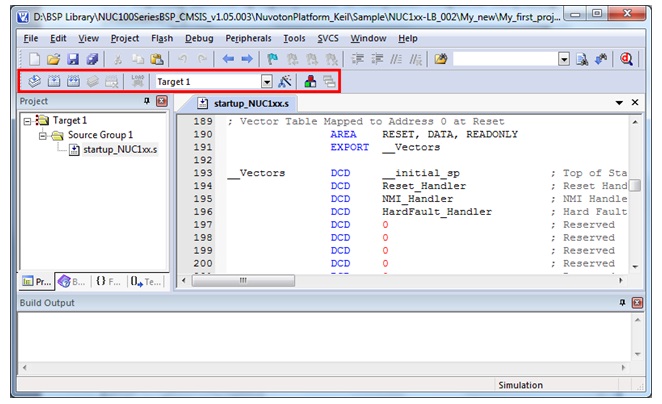
6. Після попереднього кроку проект вже має бути створений:
Далі можна побудувати проект. Для цього у меню Projectслід натиснути “Build Project”, або скористатися швидким викликом функції «F7» або відповідною піктограмою  на панелі керування .Проте під час першої компіляції виникне помилка:
на панелі керування .Проте під час першої компіляції виникне помилка:
Error: L6411E: No compatible library exists with a definition of startup symbol __main. Target not created
Ця помилка свідчить про те, що з startup_NUC1xx.s викликається підпрограма __main, яка у цьому файлі відсутня. Тому створимо її в окремому файлі main.s:
INCLUDE reg_def.s
AREA |.text|, CODE, READONLY
__main PROC
EXPORT __main [WEAK]
BX LR
ENDP
END
Окрім підпрограми __main також викликається підпрограма SystemInit. Створимо також окремий файл SystemInit.s
INCLUDE reg_def.s
AREA |.text|, CODE, READONLY
SystemInit PROC
EXPORT SystemInit [WEAK]
BX LR
ENDP
END
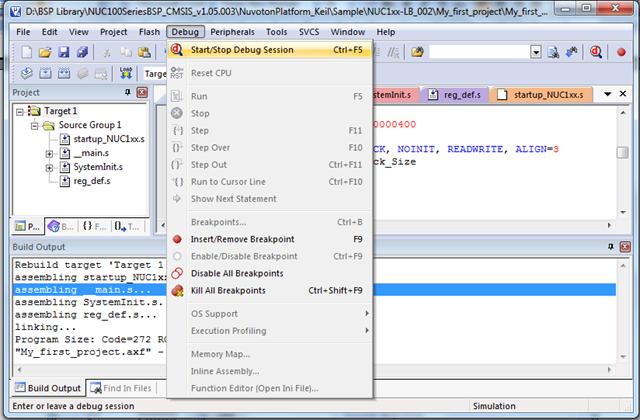
Опісля створення цих файлів і включення їх до проекту, побудова проекту має бути успішною.
Program Size: Code=100 RO-data=192 RW-data=0 ZI-data=1024 "My_first_project.axf" - 0 Error(s), 0 Warning(s).
7. Перейти до симуляції проекту можна через меню Debug->Start/Stop Debug Session, швидким викликом функції «Cntr+F5» або відповідною піктограмою  на панелі керування.
на панелі керування.
8. У режимі ладнання програми доступні нові вікна, зокрема, вікно Registers (область 1), у якому можливо переглядати поточні значення в робочих регістрах R0-R15 та xPSR ; вікно дизасемльованого варіанту програми Disassembly (область 2) ; вікно Memory (область 3), у якому можливо переглядати вміст регістрів пам’яті за адресами.

Виконаємо симуляцію коду в покроковому режимі, використовуючи комбінації «гарячих кнопок» або піктограми на панелі керування:
Reset (F9) – скидання  ;
;
Run (F5) – виконання програми  ;
;
Step (F11) – покрокове виконання програми  ;
;
Step Over (F10) – «перейти через», пройти швидко цикл програми  ;
;
Step Out (Cntr+F11) – швидкий вихід з циклу ;
Run to Cursor Line (Cntr+F10) – швидке виконання програми до курсору  ;
;
9. У полі адреса слід ввести адресу у форматі, наприклад, 0х50000100, відстежити як змінюються вміст регістрів налаштувань під час виконання програми.
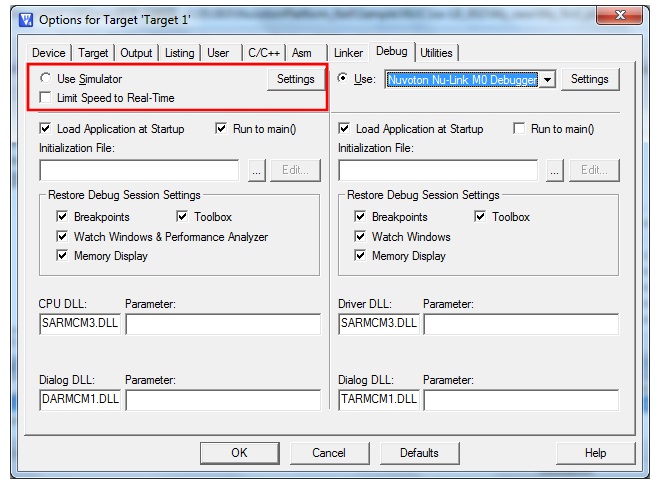
10. Зверніть увагу на те, що в режимі симуляції μVision може відображати лише вміст регістрів процесора і не підтримує емуляцію регістрів налаштувань периферійних пристроїв. Тому для повноцінного ладнання програми слід скористатися вбудованою в процесор ARMv6-M системою ладнання, а для цього необхідно налаштувати програматор Nuvoton Nu-Link.
Для цього необхідно зайти в меню налаштувань проекту Project->Options for Target(Alt+F7)  . В закладці Debugслід обрати зі списку Nuvoton Nu-Link M0 Debugger.
. В закладці Debugслід обрати зі списку Nuvoton Nu-Link M0 Debugger.
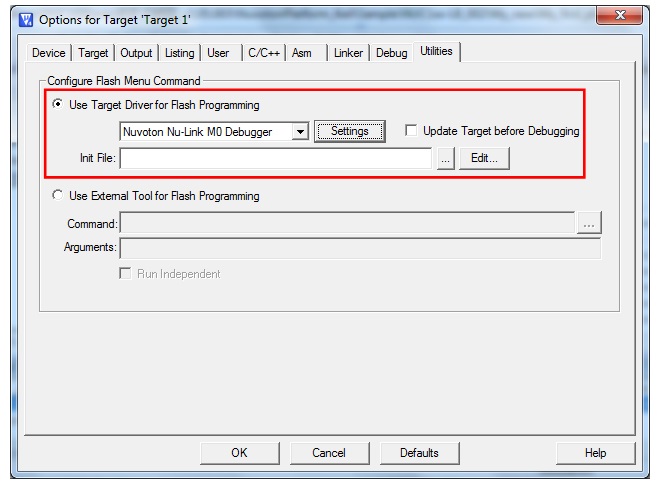
11. В закладці Utilitiesслід вказати «Use Target Driver for Flash Programing» та обрати зі списку Nuvoton Nu-Link M0 Debugger.
12. Виконуємо програмування мікроконтролера обравши з меню Flash->Download
Або скориставшись піктограмою  . Після завершення програмування можна повторити процес ладнання програми безпосередньо на мікроконтролері.
. Після завершення програмування можна повторити процес ладнання програми безпосередньо на мікроконтролері.


