Телефонуйте » (+38) 096 227 41 41
Python
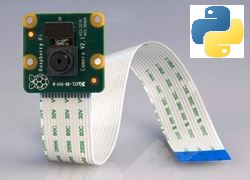
Інтерфейс на Python для роботи з модулем камери Raspberry Pi | Заняття 11
Модуль камери - відмінний аксесуар для Raspberry Pi, який дозволяє користувачам робити фотознімки і записувати відео в форматі Full HD. В попередньому курсі ми запускали відеокамеру з командного рядка, але Python розширює можливості для роботи.
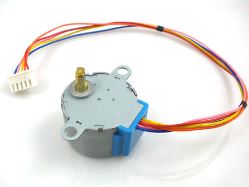
Керуємо кроковим двигуном за допомогою Python | Заняття 10
Крокові двигуни - це щось середнє між звичайним електромотором і сервоприводом. Їх перевага в тому, що можна точно регулювати їхнє положення, рухати вперед або назад на один «крок» за раз, а також вони можуть обертатися безперервно.
Керування сервоприводом за допомогою сценарію Python | Заняття 9
Сервопривід (відстежуючий привід) - є «автоматичним точним виконавцем», який отримує в режимі реального часу вхідне значення керуючого параметра і, ґрунтуючись на показаннях датчика, прагне створити і підтримувати задане значення на виході виконавчого елемента.
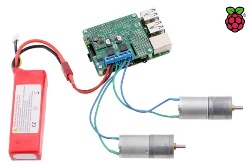
Класи в Python та керування двома двигунами з Raspberry Pi | Заняття 8
Продовжимо вивчати керування двигунами постійного струму за допомогою Raspberry Pi, але тепер додаємо в код Python класи, щоб зробити його більш ефективним.
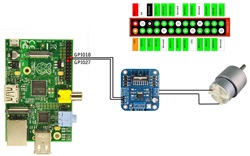
Керування двигуном постійного струму, використовуючи Python і Raspberry Pi | Заняття 7
Необхідність змінити напрямок обертання двигуна та швидкість виникає часто. Наприклад, лінійні приводи, які відкривають і закривають вікна чи двері, запускаючи обертання двигуна постійного струму в одному напрямку, щоб відкрити, а потім вмикають обертання двигуна в протилежному напрямку, щоб закрити.
Новини
-
SDR в IoTin Новини

iotSDR пропонує платформу розробок для IoT-радіо та мережевих доменів. На платі два передавачі Microchip AT86RF215, для вводу-виводу модему на Xilinx ZYNQ SoC, приймач GNSS MAX2769 для GPS, Galileo, BieDou та Glonass. Плата сумісна з ПЗ GNURadio SDR. Дозволяє розробити протоколи фізичного рівня LoRa, SigFox, WightLess, Bluetooth, BLE, 802.15.4, ZigBee тощо для IoT, або шлюз IoT через TheThingsNetwork, LPWAN або Google Thread. Пам'ять EEPROM: 1x AT24MAC602 , flash-пам'ять: 1x QSPI 128 Мб, RAM: 256 MБ DDR3,слот для Micro SD карти, входи/виходи: 2x 8-бітних інтерфейси PL, інтерфейс 8-бітного PS, Gigabit Ethernet, USB 2.0 (USB3310), USB 2.0 (CP2104), 2x SMA RF-роз'єми для приймача діапазонів IoT, 2x SMA RF-роз'єми для приймача 2,4 ГГц , RF-роз'єм приймач GNSS, FPGA-роз'єм JTAG для програмування. Розміри плати: 76,2 мм x 101,6 мм.

